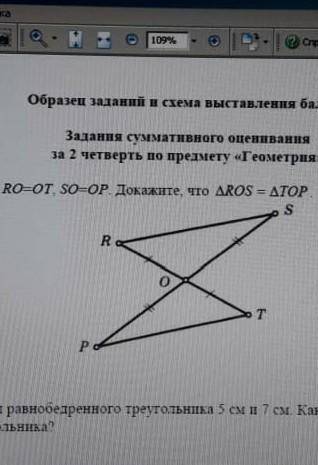
RO=OT- по усл.
SO=OP- по усл.
<( угол) ROS=TOP- вертикаль.
ROS=TOP- по 2-ум сторонам и углу между ними
RO=OT- по усл.
SO=OP- по усл.
<( угол) ROS=TOP- вертикаль.
ROS=TOP- по 2-ум сторонам и углу между ними